
浙江大学,打结,发了篇Nature
来源:iNature 2025-11-29 15:30
这种“打结传递信息”的策略不仅帮助年轻外科医生将缝合精度提升 121%,还能改善动物手术后的组织愈合;同时,它还能赋能机器人,在无力传感器的情况下实现实时、可靠的力控制。
在从日常系鞋带到精密手术再到先进机器人操作的世界里,一个被忽视已久的问题正在悄悄限制着技术的发展:机械力如何被精准传递和控制。现代医疗器械、机器人系统普遍依赖电子传感与反馈,但在空间受限的微创手术、资源匮乏的野外救援等场景中,电子设备往往难以部署、成本高且存在可靠性隐患 。尤其在外科手术中,医生通常只能依靠“感觉”和组织变形来判断缝合力度,缺乏量化依据,而缝线过紧会导致缺血坏死、过松又可能造成渗漏,这一长期困境迫切需要全新的解决思路。
在此,浙江大学杨卫院士、蔡秀军教授、杨栩旭副研究员、陈鸣宇副研究员和李铁风教授合作,提出了一个令人意想不到的答案:利用“滑结”(slipknot)来编码与传递力。研究显示,通过精确设计与预拉紧,一个普通的滑结竟能以超过 95% 的一致性输出机械信号,使得复杂操作无需电子传感器也能实现智能化。这种“打结传递信息”的策略不仅帮助年轻外科医生将缝合精度提升 121%,还能改善动物手术后的组织愈合;同时,它还能赋能机器人,在无力传感器的情况下实现实时、可靠的力控制。一个小小的结,被团队变成了跨越人类与机器的“机械智能接口”。相关成果以“Slipknot-gauged mechanical transmission and robotic operation”为题发表在《Nature》上,Yaoting Xue, Jiasheng Cao, Tao Feng, Kaihang Zhang为共同第一作者。

一个会“说话”的结:机械信息的写入与读取
在图1a中,作者展示了由多个滑结串联构成的机械信息传输示意:每一个结都像一个“力字符”,在被拉开时释放一个独特的峰值信号,机器人手臂因此能像读光栅一样获取逐次的机械信息 。图1b更直观演示了写入与读取的全过程:首先用设定好的力Ftying 打结(写入),随后通过再次拉扯让结按拓扑保持移动并最终打开(读取)。在这个过程中,接触界面、摩擦系数与弹性变形共同塑造了最终的 Fpeak。图1c–e中,滑结的稳定性与一致性被分别在微操作、协作机械臂和重载实验中验证。无论是毫米尺度的微操作(图1c)还是数十公斤的救援场景(图1e),滑结都能精准地传递力信号,仿佛有了一个极其可靠的“机械密码”。机械系统因此获得了天然的力限制与力反馈能力,不依赖任何电子器件。
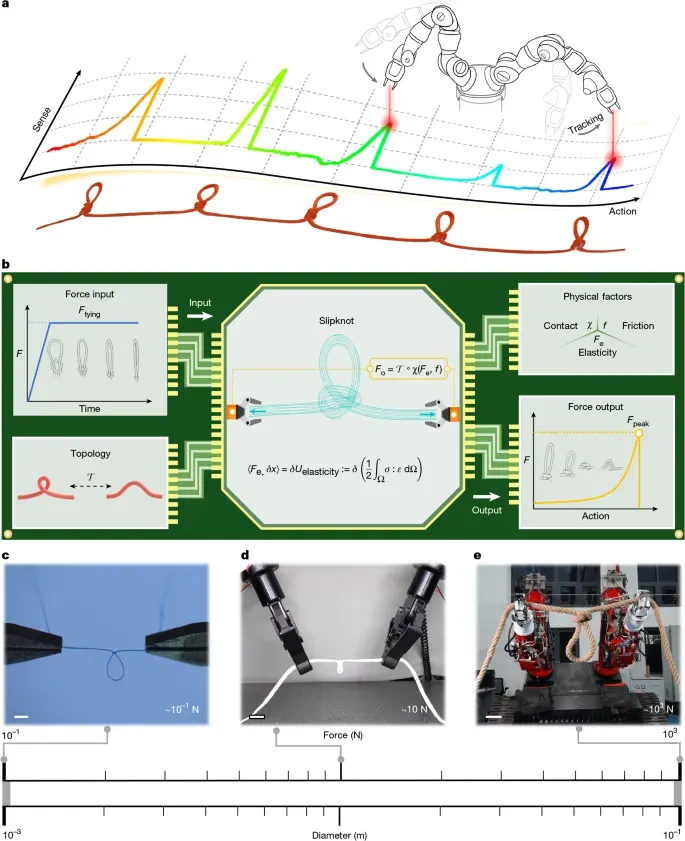
图1: slipknot 写入/读取力信息的原理与多场景验证
“滑结”的力学秘密:从应变硬化到拓扑突变
图2a–c用高速摄影与 micro-CT 清晰记录了 滑结被拉开前的逐帧变化:随着外力增加,结的滑动圈逐渐收紧、应力集中加剧,最终在临界点发生拓扑的 Reidemeister R1 变换(图2a 中间)。这一瞬间正是 Fpeak 产生的物理来源。图2d展示了实验与模型高度吻合的力-位移曲线:长时间的稳定拉伸后,力突然上升到峰值,紧接着快速下降,仿佛“啪”地一声弹开。图2e进一步展示了 500 次重复测试中 Fpeak 的高度一致性(均值约 2.945 N,标准差仅 0.135 N),这是滑结成为“力单位”的关键。图2f–i 从理论模型、结圈数量、材料直径、存放时间和拉伸速度等方面验证了 slipknot 的可调性和稳定性。通过改变 滑动环(knot loop)数或材料直径,Fpeak 可被像调阻值一样精准设定;即便放置 32 天或在不同速度下拉开,滑结仍保持稳定输出。这意味着,一个滑结就是一枚可编程、可储存、可长时间保存的“力脉冲发生器”。
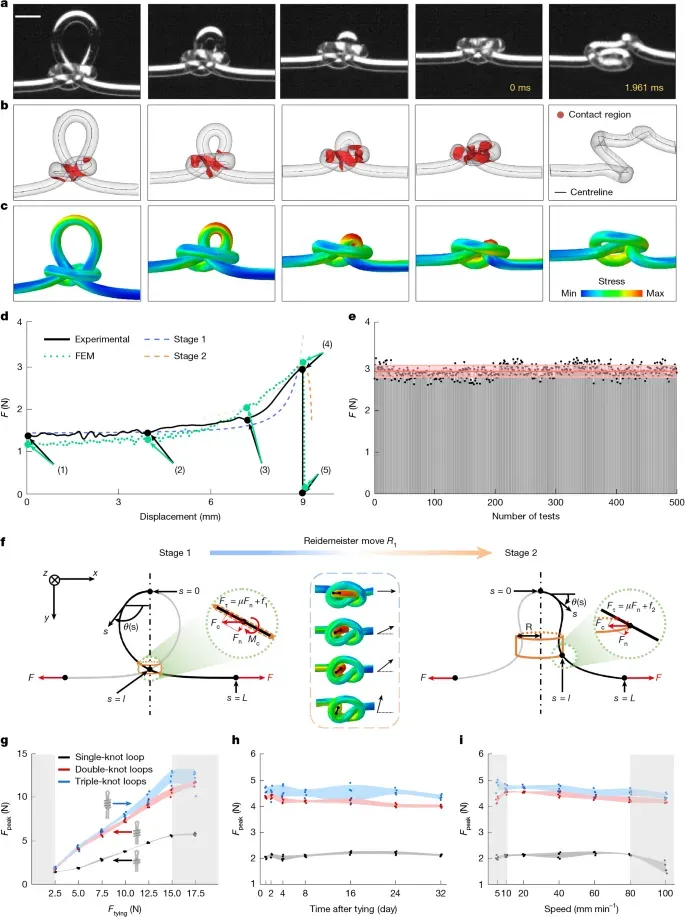
图2:滑结的力学演化、拓扑突变与 Fpeak 稳定性来源
把 滑结用到手术上:年轻医生精度提升 121%
图3a–c 提出了革命性的概念滑结缝线(sliputure):在普通缝线末端串联一个滑结,使其在被拉开时输出预设的 Fpeak,强制确保外科“打结力”处于安全范围。对于外科医生来说仍然是原有的打结方式,只是最后的拉紧步骤被 slipknot 自动校准力值。图3d的实测结果极其醒目:年轻医生在使用普通缝线时力控制离散度很大,而换成滑结缝线后,其打结力精度不仅大幅提升,还达到了与资深外科医生几乎相同的水平,提升幅度高达 121%。而资深医生使用滑结缝线后则保持稳定,不需要额外学习。图3e–l 展示了 滑结缝线在动物模型中的实际效果。根据图3f,研究团队通过实验确定了大鼠结肠修复的最佳缝合力区间(0.32–2.28 N),并将 Fpeak 定为 1.3 N。图3g 的破裂压力结果显示,使用 sliputure 修复的结肠在术后第 5 天便达到健康水平,比传统缝线快整整两天。图3h–i 的 LSCI 血流成像显示,滑结缝线缝合后组织血供恢复更好,渗漏与粘连也明显减少(图3j–l)。在腹腔镜实际操作中,滑结缝线依然能清晰提供力信号,帮助医生避免过度拉扯。

图3: 滑结缝线提高手术缝合精度并改善动物组织愈合的实验结果
让机器人也听得懂“结的语言”
在图4a,研究团队构建了一个视觉检测系统,能实时识别滑结的几何变化并判断结是否打开。也就是说,机器人无需力传感器,只要“看到”结弹开,就能瞬间停止动作。图4b–c 的猪结肠机器人缝合实验显示:使用滑结缝线的缝合效果平整、无挤压,相比之下普通缝合常出现组织鼓起和变形。图4d–e 展示了机器人在检测到滑结打开后立即制动的自动刹车系统,使得机器人具备“天生的安全限制器”。更令人惊喜的是,图4g–h 中,研究团队还把滑结植入到肌腱驱动机器人手臂的拉索中,一旦外力过大,结会自动打开,相当于机械保险丝,让机器人在与人类互动或意外碰撞时具备天然的“柔顺安全机制”。
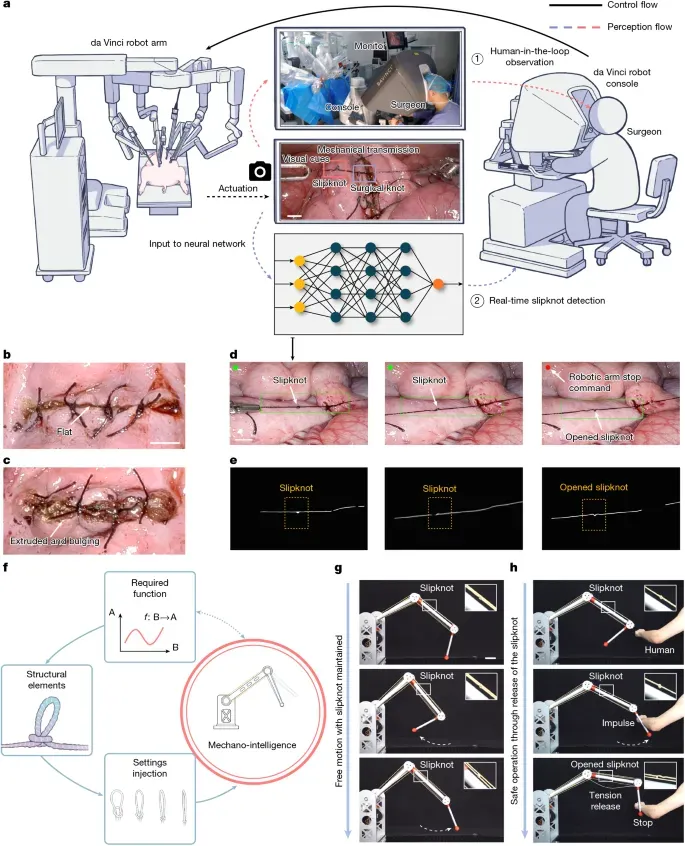
图4: 结合机器视觉与机械臂,实现机器人力控制与安全防护的系统展示
总结与展望
这项工作从一个看似普通的滑结出发,将其发展为一种可量化、可编程、跨场景的机械智能传输机制。它不依赖电子元件,不需要复杂硬件,成本极低却能提供高度精确的力控制。滑结缝线让手术更安全、更一致,也为经验不足的医生提供了即时的力校准工具;在机器人领域,slipknot 则成为可嵌入可视系统、驱动系统的天然“力限位单元”,将自动化从“看得见”推进到“摸得准”。未来,这种基于结的机械智能还可能被推广到软体机器人、极端环境作业、教育培训乃至可穿戴设备中。甚至在纳米尺度,DNA 的滑结行为也预示着跨维度的应用潜力。一个小小的结,正在悄然开启机械信息传递的新纪元。
版权声明 本网站所有注明“来源:生物谷”或“来源:bioon”的文字、图片和音视频资料,版权均属于生物谷网站所有。非经授权,任何媒体、网站或个人不得转载,否则将追究法律责任。取得书面授权转载时,须注明“来源:生物谷”。其它来源的文章系转载文章,本网所有转载文章系出于传递更多信息之目的,转载内容不代表本站立场。不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
